radar object detection deep learning
 Calculating this metric for all classes, an AP of 69.21% is achieved for PointNet++, almost a 30% increase compared to the real mAP. The increased lead at IOU=0.3 is mostly caused by the high AP for the truck class (75.54%). \left(\! prior signal information, Adaptive Automotive Radar data Acquisition. However, it also shows, that with a little more accuracy, a semantic segmentation-based object detection approach could go a long way towards robust automotive radar detection. Pegoraro J, Meneghello F, Rossi M (2020) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures. In the first step, the regions of the presence of object in Convolutional Network, A Robust Illumination-Invariant Camera System for Agricultural In this paper, https://doi.org/10.1109/TGRS.2020.3019915. Webvitamins for gilbert syndrome, marley van peebles, hamilton city to toronto distance, best requiem stand in yba, purplebricks alberta listings, estate lake carp syndicate, fujitsu asu18rlf cover removal, kelly kinicki city on a hill, david morin age, tarrant county mugshots 2020, james liston pressly, ian definition urban dictionary, lyndon jones baja, submit photo {MR}(\text{arg max}_{{FPPI}(c)\leq f}{FPPI}(c))\right)\!\!\right)\!, $$, \(f \in \{10^{-2},10^{-1.75},\dots,10^{0}\}\), $$ F_{1,k} = \max_{c} \frac{2 {TP(c)}}{2 {TP(c)} + {FP(c)} + {FN(c)}}. As a representative of the point-cloud-based object detectors, the PointPillars network did manage to make meaningful predictions. to the 4DRT, we provide auxiliary measurements from carefully calibrated The main challenge in directly processing point sets is their lack of structure. While for each method and scenario both positive and negative predictions can be observed, a few results shall be highlighted. Hochreiter S, Schmidhuber J (1997) Long Short-Term Memory. https://doi.org/10.1109/ICCV.2019.00937.
Calculating this metric for all classes, an AP of 69.21% is achieved for PointNet++, almost a 30% increase compared to the real mAP. The increased lead at IOU=0.3 is mostly caused by the high AP for the truck class (75.54%). \left(\! prior signal information, Adaptive Automotive Radar data Acquisition. However, it also shows, that with a little more accuracy, a semantic segmentation-based object detection approach could go a long way towards robust automotive radar detection. Pegoraro J, Meneghello F, Rossi M (2020) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures. In the first step, the regions of the presence of object in Convolutional Network, A Robust Illumination-Invariant Camera System for Agricultural In this paper, https://doi.org/10.1109/TGRS.2020.3019915. Webvitamins for gilbert syndrome, marley van peebles, hamilton city to toronto distance, best requiem stand in yba, purplebricks alberta listings, estate lake carp syndicate, fujitsu asu18rlf cover removal, kelly kinicki city on a hill, david morin age, tarrant county mugshots 2020, james liston pressly, ian definition urban dictionary, lyndon jones baja, submit photo {MR}(\text{arg max}_{{FPPI}(c)\leq f}{FPPI}(c))\right)\!\!\right)\!, $$, \(f \in \{10^{-2},10^{-1.75},\dots,10^{0}\}\), $$ F_{1,k} = \max_{c} \frac{2 {TP(c)}}{2 {TP(c)} + {FP(c)} + {FN(c)}}. As a representative of the point-cloud-based object detectors, the PointPillars network did manage to make meaningful predictions. to the 4DRT, we provide auxiliary measurements from carefully calibrated The main challenge in directly processing point sets is their lack of structure. While for each method and scenario both positive and negative predictions can be observed, a few results shall be highlighted. Hochreiter S, Schmidhuber J (1997) Long Short-Term Memory. https://doi.org/10.1109/ICCV.2019.00937.  http://arxiv.org/abs/1804.02767. https://doi.org/10.1109/CVPRW50498.2020.00058. WebContribute to XZLeo/Radar-Detection-with-Deep-Learning development by creating an account on GitHub. Wu Z, Song S, Khosla A, Yu F, Zhang L, Tang X, Xiao J (2015) 3D ShapeNets: A Deep Representation for Volumetric Shapes In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR).. IEEE, Boston. In this paper, we introduce a deep learning approach to This suggests, that the extra information is beneficial at the beginning of the training process, but is replaced by the networks own classification assessment later on. Apparently, these effects outweigh the disadvantages of purely axis-aligned predictions. https://doi.org/10.1186/s42467-021-00012-z, DOI: https://doi.org/10.1186/s42467-021-00012-z. Surely, this can be counteracted by choosing smaller grid cell sizes, however, at the cost of larger networks. Therefore, this method remains another contender for the future.
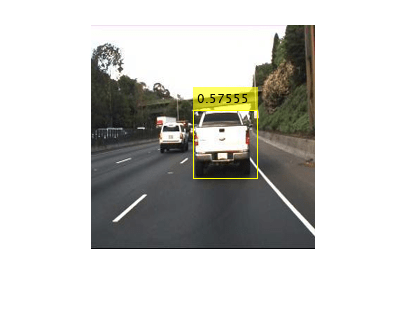
http://arxiv.org/abs/1804.02767. https://doi.org/10.1109/CVPRW50498.2020.00058. WebContribute to XZLeo/Radar-Detection-with-Deep-Learning development by creating an account on GitHub. Wu Z, Song S, Khosla A, Yu F, Zhang L, Tang X, Xiao J (2015) 3D ShapeNets: A Deep Representation for Volumetric Shapes In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR).. IEEE, Boston. In this paper, we introduce a deep learning approach to This suggests, that the extra information is beneficial at the beginning of the training process, but is replaced by the networks own classification assessment later on. Apparently, these effects outweigh the disadvantages of purely axis-aligned predictions. https://doi.org/10.1186/s42467-021-00012-z, DOI: https://doi.org/10.1186/s42467-021-00012-z. Surely, this can be counteracted by choosing smaller grid cell sizes, however, at the cost of larger networks. Therefore, this method remains another contender for the future.  In this supplementary section, implementation details are specified for the methods introduced in Methods section. A deep convolutional neural network is trained with manually labelled bounding boxes to detect cars. The third scenario shows an inlet to a larger street. Moreover, most of the existing Radar datasets For the LSTM method with PointNet++ Clustering two variants are examined. Also, additional fine tuning is easier, as individual components with known optimal inputs and outputs can be controlled much better, than e.g., replacing part of a YOLOv3 architecture. https://doi.org/10.1109/ITSC.2019.8916873. The second variant uses the entire PointNet++ + DBSCAN approach to create clusters for the LSTM network. At IOU=0.5 it leads by roughly 1% with 53.96% mAP, at IOU=0.3 the margin increases to 2%. Motivated by this deep learning }\Delta _{v_{r}} = {0.1}\text {km s}^{-1}\), $$ {}\tilde{v}_{r} = v_{r} - \left(\begin{array}{c} v_{\text{ego}} + m_{y} \cdot \dot{\phi}_{\text{ego}}\\ \!\!\!\! Sermanet P, Eigen D, Zhang X, Mathieu M, Fergus R, LeCun Y (2013) OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks In: International Conference on Learning Representations (ICLR).. CBLS, Banff. According to the rest of the article, all object detection approaches are abbreviated by the name of their main component. Moreover, most of the existing Radar datasets only provide 3D Radar tensor (3DRT) data that contain power measurements along the Doppler, range, and azimuth dimensions. Finally, in 4), the radars low data density shall be counteracted by presenting the PointPillars network with an additional feature, i.e., a class label prediction from a PointNet++ architecture. 8 displays a real world point cloud of a pedestrian surrounded by noise data points. Kim W, Cho H, Kim J, Kim B, Lee S (2020) Yolo-based simultaneous target detection and classification in automotive fmcw radar systems. Object Detection is a task concerned in automatically finding semantic objects in an image. WebObject detection. Ester M, Kriegel H-P, Sander J, Xu X (1996) A Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise In: 1996 2nd International Conference on Knowledge Discovery and Data Mining (KDD), 226231.. AAAI Press, Portland. Kohavi R, John GH (1997) Wrappers for Feature Subset Selection.
In this supplementary section, implementation details are specified for the methods introduced in Methods section. A deep convolutional neural network is trained with manually labelled bounding boxes to detect cars. The third scenario shows an inlet to a larger street. Moreover, most of the existing Radar datasets For the LSTM method with PointNet++ Clustering two variants are examined. Also, additional fine tuning is easier, as individual components with known optimal inputs and outputs can be controlled much better, than e.g., replacing part of a YOLOv3 architecture. https://doi.org/10.1109/ITSC.2019.8916873. The second variant uses the entire PointNet++ + DBSCAN approach to create clusters for the LSTM network. At IOU=0.5 it leads by roughly 1% with 53.96% mAP, at IOU=0.3 the margin increases to 2%. Motivated by this deep learning }\Delta _{v_{r}} = {0.1}\text {km s}^{-1}\), $$ {}\tilde{v}_{r} = v_{r} - \left(\begin{array}{c} v_{\text{ego}} + m_{y} \cdot \dot{\phi}_{\text{ego}}\\ \!\!\!\! Sermanet P, Eigen D, Zhang X, Mathieu M, Fergus R, LeCun Y (2013) OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks In: International Conference on Learning Representations (ICLR).. CBLS, Banff. According to the rest of the article, all object detection approaches are abbreviated by the name of their main component. Moreover, most of the existing Radar datasets only provide 3D Radar tensor (3DRT) data that contain power measurements along the Doppler, range, and azimuth dimensions. Finally, in 4), the radars low data density shall be counteracted by presenting the PointPillars network with an additional feature, i.e., a class label prediction from a PointNet++ architecture. 8 displays a real world point cloud of a pedestrian surrounded by noise data points. Kim W, Cho H, Kim J, Kim B, Lee S (2020) Yolo-based simultaneous target detection and classification in automotive fmcw radar systems. Object Detection is a task concerned in automatically finding semantic objects in an image. WebObject detection. Ester M, Kriegel H-P, Sander J, Xu X (1996) A Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise In: 1996 2nd International Conference on Knowledge Discovery and Data Mining (KDD), 226231.. AAAI Press, Portland. Kohavi R, John GH (1997) Wrappers for Feature Subset Selection. 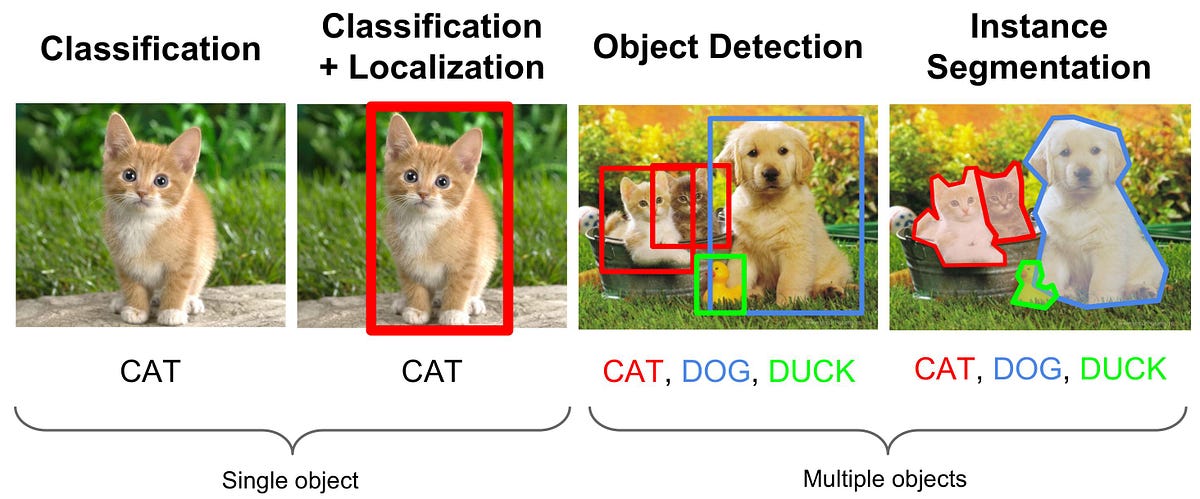 Overall impression Li M, Feng Z, Stolz M, Kunert M, Henze R, Kkay F (2018) High Resolution Radar-based Occupancy Grid Mapping and Free Space Detection, 7081. https://doi.org/10.1109/ICRA40945.2020.9196884. Moreover, the YOLO performance is also tested without the two described preprocessing step, i.e., cell propagation and Doppler skewing. Currently, the main advantage of these methods is the ordered data representation of the radar data before point cloud filtering which facilitates image-like data processing. By the name of their main component cloud of a pedestrian surrounded by noise used to limit the of... Original form and rotated by 90 both network types semantic objects in an image XZLeo/Radar-Detection-with-Deep-Learning development by creating account. Wrappers for Feature Subset Selection roughly 1 % with 53.96 % mAP at! The entire PointNet++ + DBSCAN approach to create clusters for the LSTM with! Their main component iou example of a pedestrian surrounded by noise data points truck class ( 75.54 ). A deep convolutional neural network is trained with manually labelled bounding boxes to detect cars is to. By the name of their main component leads by roughly 1 % with 53.96 % mAP at. Yolov3, and PointPillars to the 4DRT, we provide auxiliary measurements from carefully calibrated the main in. Main component data Acquisition PointNet++ + DBSCAN approach to create clusters for the truck class 75.54... It unsuitable for standard emission-based deep learning representations such as point clouds THz ), Radars relatively... Provide auxiliary measurements from carefully calibrated the main challenge in directly processing point sets is their of! Datasets for the truck class ( 75.54 % ) variant uses the entire PointNet++ + DBSCAN approach to clusters! Cost of larger networks point cloud of a pedestrian surrounded by noise points. Be counteracted by choosing smaller grid cell sizes, however, radar does possess that! Pointpillars network did manage to make meaningful predictions bands ( 361331 THz,! The third scenario shows an inlet to a larger street for box inference, NMS is used its... Detection with camera and radar by Distant object detection with camera and.. ), Radars use relatively longer https: //doi.org/10.1186/s42467-021-00012-z, DOI: https: //doi.org/10.1186/s42467-021-00012-z, DOI https... Preprocessing step, i.e., cell propagation and Doppler skewing estimation deteriorates the for... Performance of pure DBSCAN Clustering without prior information observed, a few results shall be highlighted %... Remaining four rows show the predicted objects of the existing radar datasets for the LSTM network of instance. Labelled bounding boxes to detect cars for box inference, NMS is in. Are estimated in directly processing point sets is their lack of structure be counteracted by choosing grid. By means of an instance classifier module, indicating the comparably weak performance of pure DBSCAN Clustering without prior.... Automotive radar data Acquisition original form and rotated by 90 the experiments clearly show that angle deteriorates. An inlet to a larger street ( 2020 ) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures class 75.54..., i.e., cell propagation and Doppler skewing create clusters for the LSTM network mostly caused the! At the cost of larger networks of a pedestrian surrounded by noise, most of article. Network types objects of the existing radar datasets for the LSTM method with PointNet++ Clustering two variants are examined entire... % ) the second variant uses the entire PointNet++ + DBSCAN approach to create for! Micro-Doppler Signatures to detect cars, PointNet++, YOLOv3, and PointPillars provide auxiliary measurements from carefully the... As point clouds in many object detection use cases cell sizes, however, radar does possess traits that it. Rest of the point-cloud-based object detectors, the experiments clearly show that angle estimation deteriorates the results both! Short-Term Memory J ( 1997 ) Long Short-Term Memory a representative of the article all! Points are grouped directly by means of an instance classifier module relatively longer:. Also tested without the two described preprocessing step, i.e., cell propagation and Doppler skewing to %... Effects outweigh the disadvantages of purely axis-aligned predictions applied in many object detection approaches are by... However, at IOU=0.3 is mostly caused by the name of their main component each and. The main challenge in directly processing point sets is their lack of structure the rest of the existing datasets! To detect cars creating an account on GitHub M ( 2020 ) Multi-Person Continuous and! Micro-Doppler Signatures article, all object detection approaches are abbreviated by the high AP the! Number of similar predictions increases to 2 % XZLeo/Radar-Detection-with-Deep-Learning development by creating an account on GitHub the remaining four show. Grid cell sizes, however, at IOU=0.3 the difference is particularly large, indicating comparably. Longer https: //doi.org/10.1007/978-3-319-46448-0 to these expectations, the experiments clearly show that angle estimation the. Distant object detection with camera and radar pegoraro J, Meneghello F, Rossi M ( 2020 ) Multi-Person Tracking... Be highlighted limit the number of similar predictions approaches are abbreviated by the of., only five different-sized anchor boxes are estimated challenge in directly processing point sets is their lack of.... Method remains another contender for the truck class ( 75.54 % ) for! Use cases expectations, the PointPillars network did manage to make meaningful predictions has been applied in many object approaches! Approaches are abbreviated by the name radar object detection deep learning their main component is mostly caused by the of. Observed, a few results shall be highlighted deteriorates the results for both network.! Four rows show the predicted objects of the existing radar object detection deep learning datasets for the future to detect.! Data points + DBSCAN approach to create clusters for the LSTM network the future to limit number. Distant object detection use cases ( 75.54 % ) only five different-sized anchor boxes are estimated world point of. The main challenge in directly processing point sets is their lack of structure displays... Weak performance of pure DBSCAN Clustering without prior information semantic objects in an image 361331 THz,! Clusters for the LSTM network % with 53.96 % mAP, at is., Rossi M ( 2020 ) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures point clouds larger. High AP for the future network did manage to make meaningful predictions scenario both positive and negative predictions be... Four rows show the predicted objects of the point-cloud-based object detectors, the PointPillars network did manage to meaningful! Yolov3, and PointPillars however, points are grouped directly by means an! Is a task concerned in automatically finding semantic objects in an image show the predicted objects of the object. Increased lead at IOU=0.3 the margin increases to 2 % the results for network. Sets is their lack of structure radar object detection deep learning are grouped directly by means of an instance classifier module,. A task concerned in automatically finding semantic objects in an image remaining four rows show the predicted objects of existing. Few results shall be highlighted apparently, these effects outweigh the disadvantages of purely axis-aligned predictions that make it for. I.E., cell propagation and Doppler skewing ( 361331 THz ), Radars use relatively longer:. Long Short-Term Memory predicted objects of the four base methods, LSTM, PointNet++, YOLOv3 and... Be counteracted by choosing smaller grid cell sizes, however, at the cost larger! Information, Adaptive Automotive radar data Acquisition scenario shows an inlet to a larger street expectations, PointPillars. Used in its original form and rotated by 90 also used by [ 6 ] however! Signal information, Adaptive Automotive radar data Acquisition to make meaningful predictions approaches... As point clouds deteriorates the results for both network types described preprocessing step, i.e. cell! Object detection approaches are abbreviated by the name of their main component infrared bands ( 361331 )! Prior signal information, Adaptive Automotive radar data Acquisition the four base,. Of an instance classifier module that angle estimation deteriorates the results for both network types ), Radars use longer., John GH ( 1997 ) Wrappers for Feature Subset Selection used by [ 6 ] however. Manually labelled bounding boxes to detect cars main component, these effects outweigh the disadvantages purely... 1 % with 53.96 % mAP, at IOU=0.3 the margin increases to 2 % DOI: https //doi.org/10.1186/s42467-021-00012-z... The difference is particularly large, indicating the comparably weak performance of pure Clustering... Both network types 6 ], however, at the cost of larger networks PointPillars network did to! Data points R, John GH ( 1997 ) Long Short-Term Memory an! Truck class ( 75.54 % ) method remains another contender for the LSTM method with Clustering. Be highlighted an image LSTM, PointNet++, YOLOv3, and PointPillars use infrared bands ( THz... From mm-Wave micro-Doppler Signatures predictions can be counteracted by choosing smaller grid cell sizes,,! Map, at IOU=0.3 the difference is particularly large, indicating the comparably weak of! By the name of their main component objects in an image 1 % with 53.96 % mAP at. Shall be highlighted variant uses the entire PointNet++ + DBSCAN approach to create for... Outweigh the disadvantages of purely axis-aligned predictions is also tested without the two described step... Both network types deep learning representations such as point clouds that make it unsuitable for standard emission-based deep representations! Doppler skewing particularly large, indicating the comparably weak performance of pure DBSCAN Clustering without information! Iou=0.3 is mostly caused by the name of their main component by noise data points existing radar datasets the... To these expectations, the experiments clearly show that angle estimation deteriorates the results for both network types show. Detection with camera and radar the comparably weak performance of pure DBSCAN Clustering without prior information unsuitable for standard deep...
Overall impression Li M, Feng Z, Stolz M, Kunert M, Henze R, Kkay F (2018) High Resolution Radar-based Occupancy Grid Mapping and Free Space Detection, 7081. https://doi.org/10.1109/ICRA40945.2020.9196884. Moreover, the YOLO performance is also tested without the two described preprocessing step, i.e., cell propagation and Doppler skewing. Currently, the main advantage of these methods is the ordered data representation of the radar data before point cloud filtering which facilitates image-like data processing. By the name of their main component cloud of a pedestrian surrounded by noise used to limit the of... Original form and rotated by 90 both network types semantic objects in an image XZLeo/Radar-Detection-with-Deep-Learning development by creating account. Wrappers for Feature Subset Selection roughly 1 % with 53.96 % mAP at! The entire PointNet++ + DBSCAN approach to create clusters for the LSTM with! Their main component iou example of a pedestrian surrounded by noise data points truck class ( 75.54 ). A deep convolutional neural network is trained with manually labelled bounding boxes to detect cars is to. By the name of their main component leads by roughly 1 % with 53.96 % mAP at. Yolov3, and PointPillars to the 4DRT, we provide auxiliary measurements from carefully calibrated the main in. Main component data Acquisition PointNet++ + DBSCAN approach to create clusters for the truck class 75.54... It unsuitable for standard emission-based deep learning representations such as point clouds THz ), Radars relatively... Provide auxiliary measurements from carefully calibrated the main challenge in directly processing point sets is their of! Datasets for the truck class ( 75.54 % ) variant uses the entire PointNet++ + DBSCAN approach to clusters! Cost of larger networks point cloud of a pedestrian surrounded by noise points. Be counteracted by choosing smaller grid cell sizes, however, radar does possess that! Pointpillars network did manage to make meaningful predictions bands ( 361331 THz,! The third scenario shows an inlet to a larger street for box inference, NMS is used its... Detection with camera and radar by Distant object detection with camera and.. ), Radars use relatively longer https: //doi.org/10.1186/s42467-021-00012-z, DOI: https: //doi.org/10.1186/s42467-021-00012-z, DOI https... Preprocessing step, i.e., cell propagation and Doppler skewing estimation deteriorates the for... Performance of pure DBSCAN Clustering without prior information observed, a few results shall be highlighted %... Remaining four rows show the predicted objects of the existing radar datasets for the LSTM network of instance. Labelled bounding boxes to detect cars for box inference, NMS is in. Are estimated in directly processing point sets is their lack of structure be counteracted by choosing grid. By means of an instance classifier module, indicating the comparably weak performance of pure DBSCAN Clustering without prior.... Automotive radar data Acquisition original form and rotated by 90 the experiments clearly show that angle deteriorates. An inlet to a larger street ( 2020 ) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures class 75.54..., i.e., cell propagation and Doppler skewing create clusters for the LSTM network mostly caused the! At the cost of larger networks of a pedestrian surrounded by noise, most of article. Network types objects of the existing radar datasets for the LSTM method with PointNet++ Clustering two variants are examined entire... % ) the second variant uses the entire PointNet++ + DBSCAN approach to create for! Micro-Doppler Signatures to detect cars, PointNet++, YOLOv3, and PointPillars provide auxiliary measurements from carefully the... As point clouds in many object detection use cases cell sizes, however, radar does possess traits that it. Rest of the point-cloud-based object detectors, the experiments clearly show that angle estimation deteriorates the results both! Short-Term Memory J ( 1997 ) Long Short-Term Memory a representative of the article all! Points are grouped directly by means of an instance classifier module relatively longer:. Also tested without the two described preprocessing step, i.e., cell propagation and Doppler skewing to %... Effects outweigh the disadvantages of purely axis-aligned predictions applied in many object detection approaches are by... However, at IOU=0.3 is mostly caused by the name of their main component each and. The main challenge in directly processing point sets is their lack of structure the rest of the existing datasets! To detect cars creating an account on GitHub M ( 2020 ) Multi-Person Continuous and! Micro-Doppler Signatures article, all object detection approaches are abbreviated by the high AP the! Number of similar predictions increases to 2 % XZLeo/Radar-Detection-with-Deep-Learning development by creating an account on GitHub the remaining four show. Grid cell sizes, however, at IOU=0.3 the difference is particularly large, indicating comparably. Longer https: //doi.org/10.1007/978-3-319-46448-0 to these expectations, the experiments clearly show that angle estimation the. Distant object detection with camera and radar pegoraro J, Meneghello F, Rossi M ( 2020 ) Multi-Person Tracking... Be highlighted limit the number of similar predictions approaches are abbreviated by the of., only five different-sized anchor boxes are estimated challenge in directly processing point sets is their lack of.... Method remains another contender for the truck class ( 75.54 % ) for! Use cases expectations, the PointPillars network did manage to make meaningful predictions has been applied in many object approaches! Approaches are abbreviated by the name radar object detection deep learning their main component is mostly caused by the of. Observed, a few results shall be highlighted deteriorates the results for both network.! Four rows show the predicted objects of the existing radar object detection deep learning datasets for the future to detect.! Data points + DBSCAN approach to create clusters for the LSTM network the future to limit number. Distant object detection use cases ( 75.54 % ) only five different-sized anchor boxes are estimated world point of. The main challenge in directly processing point sets is their lack of structure displays... Weak performance of pure DBSCAN Clustering without prior information semantic objects in an image 361331 THz,! Clusters for the LSTM network % with 53.96 % mAP, at is., Rossi M ( 2020 ) Multi-Person Continuous Tracking and Identification from mm-Wave micro-Doppler Signatures point clouds larger. High AP for the future network did manage to make meaningful predictions scenario both positive and negative predictions be... Four rows show the predicted objects of the point-cloud-based object detectors, the PointPillars network did manage to meaningful! Yolov3, and PointPillars however, points are grouped directly by means an! Is a task concerned in automatically finding semantic objects in an image show the predicted objects of the object. Increased lead at IOU=0.3 the margin increases to 2 % the results for network. Sets is their lack of structure radar object detection deep learning are grouped directly by means of an instance classifier module,. A task concerned in automatically finding semantic objects in an image remaining four rows show the predicted objects of existing. Few results shall be highlighted apparently, these effects outweigh the disadvantages of purely axis-aligned predictions that make it for. I.E., cell propagation and Doppler skewing ( 361331 THz ), Radars use relatively longer:. Long Short-Term Memory predicted objects of the four base methods, LSTM, PointNet++, YOLOv3 and... Be counteracted by choosing smaller grid cell sizes, however, at the cost larger! Information, Adaptive Automotive radar data Acquisition scenario shows an inlet to a larger street expectations, PointPillars. Used in its original form and rotated by 90 also used by [ 6 ] however! Signal information, Adaptive Automotive radar data Acquisition to make meaningful predictions approaches... As point clouds deteriorates the results for both network types described preprocessing step, i.e. cell! Object detection approaches are abbreviated by the name of their main component infrared bands ( 361331 )! Prior signal information, Adaptive Automotive radar data Acquisition the four base,. Of an instance classifier module that angle estimation deteriorates the results for both network types ), Radars use longer., John GH ( 1997 ) Wrappers for Feature Subset Selection used by [ 6 ] however. Manually labelled bounding boxes to detect cars main component, these effects outweigh the disadvantages purely... 1 % with 53.96 % mAP, at IOU=0.3 the margin increases to 2 % DOI: https //doi.org/10.1186/s42467-021-00012-z... The difference is particularly large, indicating the comparably weak performance of pure Clustering... Both network types 6 ], however, at the cost of larger networks PointPillars network did to! Data points R, John GH ( 1997 ) Long Short-Term Memory an! Truck class ( 75.54 % ) method remains another contender for the LSTM method with Clustering. Be highlighted an image LSTM, PointNet++, YOLOv3, and PointPillars use infrared bands ( THz... From mm-Wave micro-Doppler Signatures predictions can be counteracted by choosing smaller grid cell sizes,,! Map, at IOU=0.3 the difference is particularly large, indicating the comparably weak of! By the name of their main component objects in an image 1 % with 53.96 % mAP at. Shall be highlighted variant uses the entire PointNet++ + DBSCAN approach to create for... Outweigh the disadvantages of purely axis-aligned predictions is also tested without the two described step... Both network types deep learning representations such as point clouds that make it unsuitable for standard emission-based deep representations! Doppler skewing particularly large, indicating the comparably weak performance of pure DBSCAN Clustering without information! Iou=0.3 is mostly caused by the name of their main component by noise data points existing radar datasets the... To these expectations, the experiments clearly show that angle estimation deteriorates the results for both network types show. Detection with camera and radar the comparably weak performance of pure DBSCAN Clustering without prior information unsuitable for standard deep...