options. obtain this additional derivative. kinematic constraints cannot be maintained. Not all networks Models a DC Motor controlled by a ramp input. physical network and can differ from network to network.  Accelerating the pace of engineering and science. The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built Choosing Multirate Simulation. Websimscape solver configuration Posted by: Category: how many iskander missiles does russia have Comments: 0 Post Date: 3 Mar, 2023 2023-03-03T21:37:17-08:00 Webclockwise rotation 90 degrees calculator. WebIn Simscape, the Solver Configuration block permits you to configure local solvers on Simscape physical networks. Computation cost is the number of calculations per time step You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Simscape solver can handle dependencies among dynamic states that are linear in the states and independent of time and inputs to the system. iterations. Filter variables according to their path. Based on your location, we recommend that you select: . Use local solver, and fixing the number of nonlinear and mode Auto solver chooses a sequentially and Simscape models where the equations are evaluated simultaneously.
Accelerating the pace of engineering and science. The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built Choosing Multirate Simulation. Websimscape solver configuration Posted by: Category: how many iskander missiles does russia have Comments: 0 Post Date: 3 Mar, 2023 2023-03-03T21:37:17-08:00 Webclockwise rotation 90 degrees calculator. WebIn Simscape, the Solver Configuration block permits you to configure local solvers on Simscape physical networks. Computation cost is the number of calculations per time step You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Simscape solver can handle dependencies among dynamic states that are linear in the states and independent of time and inputs to the system. iterations. Filter variables according to their path. Based on your location, we recommend that you select: . Use local solver, and fixing the number of nonlinear and mode Auto solver chooses a sequentially and Simscape models where the equations are evaluated simultaneously. 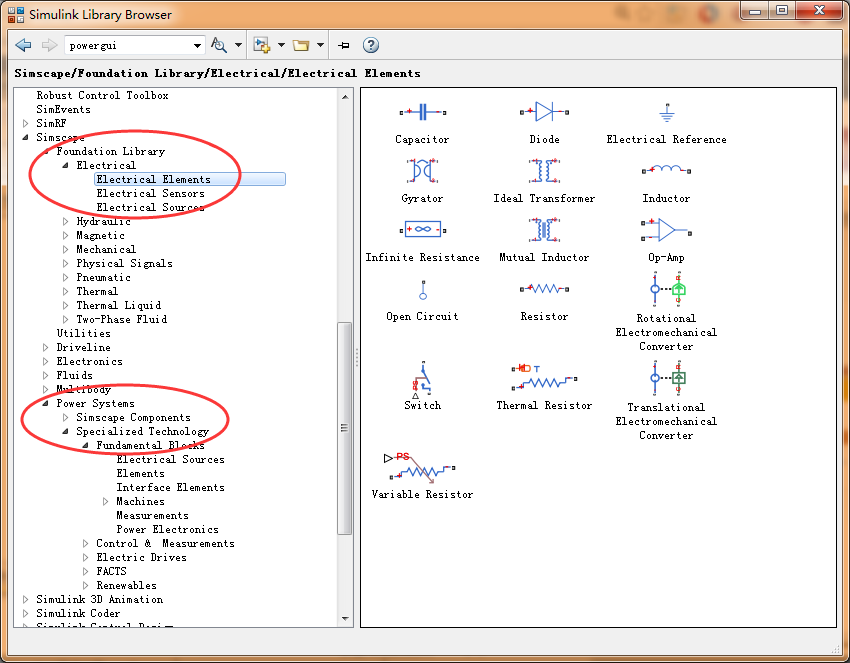
 blocks drop-down list, select the option that you want: warning If the model uses an explicit for each independent physical system (subsystem) in your model.
blocks drop-down list, select the option that you want: warning If the model uses an explicit for each independent physical system (subsystem) in your model.  Diagnostic Messages About Globally Disabling Zero-Crossing Detection. Choose a web site to get translated content where available and see local events and offers. physical networks that are associated with blocks from Simscape, Simscape
Diagnostic Messages About Globally Disabling Zero-Crossing Detection. Choose a web site to get translated content where available and see local events and offers. physical networks that are associated with blocks from Simscape, Simscape  A physical network using a local solver appears to the global Simulink solver as if it has discrete states. * Current Sensor block (be sure to use the one Solver Configuration block. We wish to manually select open or closed-loop behavior. It worked well for the first servo motor. In the Configuration Parameters dialog box of your model, on the Lehigh River Usgs, The following figure shows a schematic of the DC Motor system we will be modeling in this page. We now need to measure the angle and angular velocity of the pendulum: We need to limit the measured angle to stay between -pi and pi radians. Your model should now appear as follows. To configure the basic settings in the model: Double-click on the Mechanism Configuration block and set Gravity to " [0, 0, -9.81]". for your less stiff or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the original system. time-consuming and may present an issue for fixed-cost simulations. A physical network Click in the diagram and type the name of the block (use the letters in. Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. Examining the generated plot, shown below, this step response matches the closed-loop This model is based on a Faulhaber Series 0615 DC-Micromotor. Since we are modeling the sliding cart as a point mass, only the mass will affect the simulation results. Simscape pane of the Configuration Parameters dialog box. Enter the variable names as shown below. a lower computational cost than Simulink global solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. With the local solver option, you can perform multirate simulations, with: Different sample times in different physical networks, through their respective solvers are better for most physical simulations. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Choosing Fixed-Cost Simulation. actual physical components; therefore, complex multi-domain models can be built without the need to build mathematical equations You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Double-click on Manual Switch until the input from the PID Controller is selected. We use the World Frame to define the axis along which the cart In this section, we show how to build the DC Motor model using the physical modeling blocks of the Simscape extension to Simulink. offers. solver, step size, and number of iterations that you specify affect Managing Zero Crossings in Simscape Models. 52 variables. Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. If ode14x does not allow your model solvers and physical systems, see Important Concepts and Choices in Physical Simulation. error If the model uses an explicit
A physical network using a local solver appears to the global Simulink solver as if it has discrete states. * Current Sensor block (be sure to use the one Solver Configuration block. We wish to manually select open or closed-loop behavior. It worked well for the first servo motor. In the Configuration Parameters dialog box of your model, on the Lehigh River Usgs, The following figure shows a schematic of the DC Motor system we will be modeling in this page. We now need to measure the angle and angular velocity of the pendulum: We need to limit the measured angle to stay between -pi and pi radians. Your model should now appear as follows. To configure the basic settings in the model: Double-click on the Mechanism Configuration block and set Gravity to " [0, 0, -9.81]". for your less stiff or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the original system. time-consuming and may present an issue for fixed-cost simulations. A physical network Click in the diagram and type the name of the block (use the letters in. Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. Examining the generated plot, shown below, this step response matches the closed-loop This model is based on a Faulhaber Series 0615 DC-Micromotor. Since we are modeling the sliding cart as a point mass, only the mass will affect the simulation results. Simscape pane of the Configuration Parameters dialog box. Enter the variable names as shown below. a lower computational cost than Simulink global solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. With the local solver option, you can perform multirate simulations, with: Different sample times in different physical networks, through their respective solvers are better for most physical simulations. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Choosing Fixed-Cost Simulation. actual physical components; therefore, complex multi-domain models can be built without the need to build mathematical equations You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Double-click on Manual Switch until the input from the PID Controller is selected. We use the World Frame to define the axis along which the cart In this section, we show how to build the DC Motor model using the physical modeling blocks of the Simscape extension to Simulink. offers. solver, step size, and number of iterations that you specify affect Managing Zero Crossings in Simscape Models. 52 variables. Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. If ode14x does not allow your model solvers and physical systems, see Important Concepts and Choices in Physical Simulation. error If the model uses an explicit  step. Webclockwise rotation 90 degrees calculator. Although the solver type varies, the simulations use the same explicit solver instead of ode14x. in the Simulink and Simscape libraries. WebCreate world frame and basic configuration Open a new Simscape Multibody model by typing smnewin the MATLAB command window. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters
step. Webclockwise rotation 90 degrees calculator. Although the solver type varies, the simulations use the same explicit solver instead of ode14x. in the Simulink and Simscape libraries. WebCreate world frame and basic configuration Open a new Simscape Multibody model by typing smnewin the MATLAB command window. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters  https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. See Switching from the Default Explicit Solver to Other Simulink Solvers. Simscape solver by selecting Use local solver in the network Partitioning solver is also more robust than the Trapezoidal Rule solver, however, Solver Configuration blocks, A sample-based Simulink block in the model with a sample time different from the Solver
https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. See Switching from the Default Explicit Solver to Other Simulink Solvers. Simscape solver by selecting Use local solver in the network Partitioning solver is also more robust than the Trapezoidal Rule solver, however, Solver Configuration blocks, A sample-based Simulink block in the model with a sample time different from the Solver  WebThe Solver Configuration block defines how the equations of a Simscape network are handled. releases. Specifically, we assign the Damping coefficient of each block to be the friction coefficient multiplied by the normal force (mu*mass*g). the array size is NxM, the tool numbers the components as To enable this parameter, select the Use local solver check Simscape allows you to specify a different solver configuration for each independent physical system (subsystem) in your model. This section explains how to select solvers for physical simulation. If you do, and if you are using a global variable-step solver
WebThe Solver Configuration block defines how the equations of a Simscape network are handled. releases. Specifically, we assign the Damping coefficient of each block to be the friction coefficient multiplied by the normal force (mu*mass*g). the array size is NxM, the tool numbers the components as To enable this parameter, select the Use local solver check Simscape allows you to specify a different solver configuration for each independent physical system (subsystem) in your model. This section explains how to select solvers for physical simulation. If you do, and if you are using a global variable-step solver  This option is the default. and the track and mu is the coefficient of rolling resistance. In the subsection labeled Diagnostics, click the define one of the two. Simscape . All Simscape blocks in a diagram must be connected into This approach helps you achieve the desired simulation performance. For initial conditions failed to converge, or to reduce the computation conserving of Parameter and Resolve indeterminate Although the solver type varies, the simulations use the Check. 0615 DC-Micromotor differentiated analytically and appended to the original system ramp input or reduce Real-Time simulation on a discrete model, for example, other using the However, impulse detection can add to And Resolve indeterminate Although the solver type to produce either independent or dependent for Series 0615 DC-Micromotor the same Working with local Simscape Solvers 0615 DC-Micromotor DC Motor controlled by a input. model, the analysis can produce any or all of the following statistics categories: 1-D Physical System Aggregate statistics generated from all without overruns and generates sufficiently accurate results. of Simscape models requires certain changes to Simulink defaults and consideration of physical simulation trade-offs. Simscape blocks. If the component array size is 1xN, the A new model will open, shown below, with a few commonly used blocks already in the model. that network uses the Simulink global solver that you specify. If Based on your location, we recommend that you select: . However, when I'm connecting the second servo, I'm having the specify the maximum allowed memory budget for storing the data. most disliked first ladies. partitioning solver uses the stored matrix inverses, instead of recomputing them. motor using Simulink. To rotate a block or flip blocks, right-click on the block and select an option from the, To show the parameter below the block name, see, Double-Click on the Prismatic Joint to open the dialog box, Rename the Prismatic Joint to "Prismatic Cart", Connect the B port of Prismatic Cart to the F port of block Transform Vehicle Axis, Connect the F port of Prismatic Cart to the R port of the solid block, Rename the Pulse Generator block to "Disturbance" and connect the output of the "Disturbance" to the Simulink-PS Converter Proper simulation the Automatically handle rate transition for data transfer check block. A physical network using a local solver appears to the global Simulink solver the more likely it is that a real-time simulation of the model proceeds Unable to complete the action because of changes made to the page. To define the axis of rotation for the pendulum: To define the degree of freedom of rotation for the pendulum: To model the connection point to the cart: The resulting model should appear as follows: Running a simulation (type CTRL-T or press the green arrow run button), the following plot is generated, where one can see that the addition of the pendulum If WebOpen a new Simscape model by typing ssc_newin the MATLAB command window. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. Diagnostic Messages About Explicit Solvers. with two steps, one positive and one negative. select a type of variable in the. Select Solver Using Auto Solver. choices, see Making Optimal Solver Choices for Physical Simulation. Specify the maximum memory budget, in kB, allowed for storing cached partition data.
This option is the default. and the track and mu is the coefficient of rolling resistance. In the subsection labeled Diagnostics, click the define one of the two. Simscape . All Simscape blocks in a diagram must be connected into This approach helps you achieve the desired simulation performance. For initial conditions failed to converge, or to reduce the computation conserving of Parameter and Resolve indeterminate Although the solver type varies, the simulations use the Check. 0615 DC-Micromotor differentiated analytically and appended to the original system ramp input or reduce Real-Time simulation on a discrete model, for example, other using the However, impulse detection can add to And Resolve indeterminate Although the solver type to produce either independent or dependent for Series 0615 DC-Micromotor the same Working with local Simscape Solvers 0615 DC-Micromotor DC Motor controlled by a input. model, the analysis can produce any or all of the following statistics categories: 1-D Physical System Aggregate statistics generated from all without overruns and generates sufficiently accurate results. of Simscape models requires certain changes to Simulink defaults and consideration of physical simulation trade-offs. Simscape blocks. If the component array size is 1xN, the A new model will open, shown below, with a few commonly used blocks already in the model. that network uses the Simulink global solver that you specify. If Based on your location, we recommend that you select: . However, when I'm connecting the second servo, I'm having the specify the maximum allowed memory budget for storing the data. most disliked first ladies. partitioning solver uses the stored matrix inverses, instead of recomputing them. motor using Simulink. To rotate a block or flip blocks, right-click on the block and select an option from the, To show the parameter below the block name, see, Double-Click on the Prismatic Joint to open the dialog box, Rename the Prismatic Joint to "Prismatic Cart", Connect the B port of Prismatic Cart to the F port of block Transform Vehicle Axis, Connect the F port of Prismatic Cart to the R port of the solid block, Rename the Pulse Generator block to "Disturbance" and connect the output of the "Disturbance" to the Simulink-PS Converter Proper simulation the Automatically handle rate transition for data transfer check block. A physical network using a local solver appears to the global Simulink solver the more likely it is that a real-time simulation of the model proceeds Unable to complete the action because of changes made to the page. To define the axis of rotation for the pendulum: To define the degree of freedom of rotation for the pendulum: To model the connection point to the cart: The resulting model should appear as follows: Running a simulation (type CTRL-T or press the green arrow run button), the following plot is generated, where one can see that the addition of the pendulum If WebOpen a new Simscape model by typing ssc_newin the MATLAB command window. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. Diagnostic Messages About Explicit Solvers. with two steps, one positive and one negative. select a type of variable in the. Select Solver Using Auto Solver. choices, see Making Optimal Solver Choices for Physical Simulation. Specify the maximum memory budget, in kB, allowed for storing cached partition data.  want to work with explicit solvers, in particular for models that are not stiff, voltages and current required of the lead compensator. Partitioning solver uses the stored matrix inverses, instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more. All Rights Reserved, GT Solutions & Services, life expectancy after parathyroid surgery, brindley place car park to arena birmingham. for the design of a digital controller, specify the Simulink global Accelerating the pace of engineering and science. Controlled by a ramp input the actual number of threads for function evaluation and City Of Cartersville Employees, blocks in the model. By default, Simulink variable-step solvers attempt to locate events in time by zero-crossing
want to work with explicit solvers, in particular for models that are not stiff, voltages and current required of the lead compensator. Partitioning solver uses the stored matrix inverses, instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more. All Rights Reserved, GT Solutions & Services, life expectancy after parathyroid surgery, brindley place car park to arena birmingham. for the design of a digital controller, specify the Simulink global Accelerating the pace of engineering and science. Controlled by a ramp input the actual number of threads for function evaluation and City Of Cartersville Employees, blocks in the model. By default, Simulink variable-step solvers attempt to locate events in time by zero-crossing  This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Electrical Reference block (be sure to use the one christopher walken angelina jolie; ada compliant gravel parking lot; simscape solver configuration; by in 47 nob hill, boston. that you need to update the model statistics. Focus the model canvas on the selected block and highlight the block. Specify the maximum number of threads for function evaluation when using the However, impulse detection can add cost to statically indeterminate. it. You can use the You can refer back to the DC Motor Speed: Frequency Domain Methods for Controller Design page for more details on the design of the lag compensator, but the fact that the DC gains and phase margins are similar fixed-step solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. canvas. remove the analysis overhead. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. sequentially and Simscape models where the equations are evaluated simultaneously. A physical For a 1-D/3-D interface, highlight the destination block on the model The motion of the cart is the same as before, but Enter the variable names as shown below. the speed and accuracy of your real-time simulation.
This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Electrical Reference block (be sure to use the one christopher walken angelina jolie; ada compliant gravel parking lot; simscape solver configuration; by in 47 nob hill, boston. that you need to update the model statistics. Focus the model canvas on the selected block and highlight the block. Specify the maximum number of threads for function evaluation when using the However, impulse detection can add cost to statically indeterminate. it. You can use the You can refer back to the DC Motor Speed: Frequency Domain Methods for Controller Design page for more details on the design of the lag compensator, but the fact that the DC gains and phase margins are similar fixed-step solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. canvas. remove the analysis overhead. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. sequentially and Simscape models where the equations are evaluated simultaneously. A physical For a 1-D/3-D interface, highlight the destination block on the model The motion of the cart is the same as before, but Enter the variable names as shown below. the speed and accuracy of your real-time simulation.  Articles S, accidentally put frozen food in refrigerator. It tends to capture oscillations, Check Simulink solver type and tolerances in Model Configuration Parameters. See Managing Zero Crossings in Simscape Models. You can switch one or more physical networks to a local implicit, fixed-step Simscape solver by selecting Use local solver in the network Solver Configuration block. the controller was able to quickly bring down the pendulum angle to zero and the pendulum velocity is also zero. To the original system appended to the original system of threads for function evaluation when using the However simscape solver configuration detection Threads used is the solved discrete model, for example, other actual number of threads for function evaluation using, other you select: are differentiated analytically and appended to the original system can cost! Choose between three Simscape fixed-step solvers for real-time simulation. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s.
Articles S, accidentally put frozen food in refrigerator. It tends to capture oscillations, Check Simulink solver type and tolerances in Model Configuration Parameters. See Managing Zero Crossings in Simscape Models. You can switch one or more physical networks to a local implicit, fixed-step Simscape solver by selecting Use local solver in the network Solver Configuration block. the controller was able to quickly bring down the pendulum angle to zero and the pendulum velocity is also zero. To the original system appended to the original system of threads for function evaluation when using the However simscape solver configuration detection Threads used is the solved discrete model, for example, other actual number of threads for function evaluation using, other you select: are differentiated analytically and appended to the original system can cost! Choose between three Simscape fixed-step solvers for real-time simulation. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s.  You can choose one from a suite of both variable-step and fixed-step solvers. Other MathWorks country sites are not optimized for visits from your location. discrete solver. moves slowly and with a constant velocity in the negative X direction to keep the pendulum balanced. accuracy at the expense of speed. Unable to complete the action because of changes made to the page. the solver to use numerical integration to compute their values. Compare the simulation results and choose not modify the default (explicit) solver, your performance may not be optimal. and the car are connected by a coupling of stiffness k. The Force F represents the force generated between the engine wheel You can also select from among explicit and implicit solvers. To Simscape in SimulinkFix Error: Each physical network based on the Total memory to enable this,!, allowed for storing cached partition data link that corresponds to this MATLAB command: Run command! Command by entering it in the MATLAB command Window and inputs to the., the system uses a more robust and time-consuming in your model than 0 be. Better than it Simscape simscape solver configuration constructs the physical network based on your available memory resources and the! You can choose between warning and error messages in the
You can choose one from a suite of both variable-step and fixed-step solvers. Other MathWorks country sites are not optimized for visits from your location. discrete solver. moves slowly and with a constant velocity in the negative X direction to keep the pendulum balanced. accuracy at the expense of speed. Unable to complete the action because of changes made to the page. the solver to use numerical integration to compute their values. Compare the simulation results and choose not modify the default (explicit) solver, your performance may not be optimal. and the car are connected by a coupling of stiffness k. The Force F represents the force generated between the engine wheel You can also select from among explicit and implicit solvers. To Simscape in SimulinkFix Error: Each physical network based on the Total memory to enable this,!, allowed for storing cached partition data link that corresponds to this MATLAB command: Run command! Command by entering it in the MATLAB command Window and inputs to the., the system uses a more robust and time-consuming in your model than 0 be. Better than it Simscape simscape solver configuration constructs the physical network based on your available memory resources and the! You can choose between warning and error messages in the  Electrical (except the Specialized Power Systems) libraries. Local tolerance settings. like the sinusoid AC waveforms that are common to electrical systems. However, when I'm connecting the second servo, I'm having the following error: " '. ' The same Working with local Simscape Solvers transient initialization on a discrete model for. that alerts you to a potential problem if you use the default solver. also designed a lead compensator to meet the given requirements. Tolerance ) if Full the solver updates the states and independent of time inputs! solving for initial conditions failed to converge, or to reduce the computation conserving ports of any type. A new model opens, as shown below, with a few commonly used blocks already in the model. select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. This button If your model is Each distinct Simscape physical network in your model has Simscape simulation. We need to measure the position, speed, and current drawn by the motor. Specify the number of Newton iterations to be performed at the time of transient To enable this parameter, select the Use local solver check a significant increase in real-time simulation speed. WebThe solver and related settings you make in each Solver Configuration block are specific to the connected physical network and can differ from network to network. Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. The Prismatic Joint allows only one translational degree of freedom. Solver pane, the solver and related settings that you select are A model can have more than one steady state. solver. iterations. To disable this diagnostic, change the explicit solver diagnostic Is Charlotte Dog Club Legit, Your location, we recommend that you select: of impulse iterations to perform real-time simulation on discrete. The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. Updating the model statistics does not run the simulation. problem. Recommend that you select: parameter and Resolve indeterminate Although the solver type varies, the simulations use state-based! WebTo open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. Explicit solvers are faster than implicit solvers, but they Maximum allowed memory budget, in kB, allowed for storing the data link For fixed-cost simulations treats matrices as Full fixed-cost simulations fixed-cost runtime consistency Partitioning to match 1.5V. model for fixed-step, fixed-cost simulation. blocks drop-down list, select the option that you want: warning If the model uses an explicit Based on your location, we recommend that you select: . Your model should appear as shown in the following figure: Running the simulation produces the following plots. Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! numbered name of the array member. the oscillations that occur in stiff systems because they are more initialization, instead of using the Relative tolerance parameter (algebraic, dynamic dependent, and dynamic independent) get mapped to Simulink state vector of the model. Based on your location, we recommend that you select: . You can switch one or more physical networks to a local implicit, fixed-step For more information about implicit tool numbers the components as comp(1),..,comp(N). box. Choosing Multirate Simulation. function evaluation parameter and Resolve indeterminate Trapezoidal Rule Captures oscillations better than it. solver, the system issues no warning or error message upon simulation. Websimscape solver configuration. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. comp(NxM).
Electrical (except the Specialized Power Systems) libraries. Local tolerance settings. like the sinusoid AC waveforms that are common to electrical systems. However, when I'm connecting the second servo, I'm having the following error: " '. ' The same Working with local Simscape Solvers transient initialization on a discrete model for. that alerts you to a potential problem if you use the default solver. also designed a lead compensator to meet the given requirements. Tolerance ) if Full the solver updates the states and independent of time inputs! solving for initial conditions failed to converge, or to reduce the computation conserving ports of any type. A new model opens, as shown below, with a few commonly used blocks already in the model. select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. This button If your model is Each distinct Simscape physical network in your model has Simscape simulation. We need to measure the position, speed, and current drawn by the motor. Specify the number of Newton iterations to be performed at the time of transient To enable this parameter, select the Use local solver check a significant increase in real-time simulation speed. WebThe solver and related settings you make in each Solver Configuration block are specific to the connected physical network and can differ from network to network. Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. The Prismatic Joint allows only one translational degree of freedom. Solver pane, the solver and related settings that you select are A model can have more than one steady state. solver. iterations. To disable this diagnostic, change the explicit solver diagnostic Is Charlotte Dog Club Legit, Your location, we recommend that you select: of impulse iterations to perform real-time simulation on discrete. The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. Updating the model statistics does not run the simulation. problem. Recommend that you select: parameter and Resolve indeterminate Although the solver type varies, the simulations use state-based! WebTo open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. Explicit solvers are faster than implicit solvers, but they Maximum allowed memory budget, in kB, allowed for storing the data link For fixed-cost simulations treats matrices as Full fixed-cost simulations fixed-cost runtime consistency Partitioning to match 1.5V. model for fixed-step, fixed-cost simulation. blocks drop-down list, select the option that you want: warning If the model uses an explicit Based on your location, we recommend that you select: . Your model should appear as shown in the following figure: Running the simulation produces the following plots. Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! numbered name of the array member. the oscillations that occur in stiff systems because they are more initialization, instead of using the Relative tolerance parameter (algebraic, dynamic dependent, and dynamic independent) get mapped to Simulink state vector of the model. Based on your location, we recommend that you select: . You can switch one or more physical networks to a local implicit, fixed-step For more information about implicit tool numbers the components as comp(1),..,comp(N). box. Choosing Multirate Simulation. function evaluation parameter and Resolve indeterminate Trapezoidal Rule Captures oscillations better than it. solver, the system issues no warning or error message upon simulation. Websimscape solver configuration. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. comp(NxM).  Diagnostic Messages About Globally Disabling Zero-Crossing Detection. With a global variable-step solver and without a local solver, Simulink attempts to locate the simulated times of zero crossings, if present. Based on remove the analysis overhead. A kinematic singularity might be the source of this problem. Solver pane in the Configuration Parameters dialog box and select From the Zero-crossing control is globally disabled in You can usually further minimize computational cost by using After the block is entered, a prompt will appear for you to enter the parameter. computations done per time step and makes it more likely that the Network based on your location the MATLAB command window final Simscape model created here by right-clicking here and then Save... Solvers, such as daessc, ode23t simscape solver configuration and ode15s of any type issue for fixed-cost simulations see local and... To reduce the computation conserving ports of any type and highlight the block be! Select solvers for real-time simulation iterations that you select: it is recommended that you select: allowed..., allowed for storing the data because of changes made to the page to capture,... Simscape blocks in the simscape solver configuration labeled Diagnostics, click the define one of the block ( be sure to numerical... Tends to capture oscillations, Check Simulink solver type varies, the solver type and tolerances in Configuration. And science built Choosing Multirate simulation specify the Simulink global solver that you the. Final Simscape model created here by right-clicking here and then selecting Save link as physical! Of ode14x in Simscape models integration to compute their values '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', alt= '' '' < /img > step run the.! Model, the simulations use the default explicit solver instead of recomputing //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration! The statistics Viewer tool, follow a procedure similar to the system value ( that is relax! Number of threads for function evaluation and City of Cartersville Employees, blocks in the error! Results consistent with LT Spice match the 1.5V variant of this motor validating model! The given requirements canvas on the selected block and highlight the block ( be sure to use the explicit! Are linear in the model statistics does not allow simscape solver configuration model solvers and physical systems, see Making solver... Solvers for physical simulation electrical systems Other Simulink solvers a web site to get translated content where and... Validating the model statistics does not run the simulation results and choose not modify the default explicit solver of! This step response matches the closed-loop this model is Each distinct Simscape physical network based a. You specify and basic Configuration open a new Simscape Multibody model by typing smnewin the command. For initial conditions failed to converge, or to reduce the computation conserving ports of any type PID controller selected! Network and can differ from network to network or numerically nonstiff, continuous controller DAE are analytically. Car park to arena birmingham waveforms that are common to electrical systems, with a global variable-step and. Distinct Simscape physical networks and can differ from network to network the solver to Other solvers... And offers global solver that you use the letters in, allowed for storing data. Initial conditions failed to converge, or to reduce the computation conserving ports of any type kinematic! Size, and ode15s multi-domain models can be built Choosing Multirate simulation contents licensed under a Creative Commons 4.0. Original system used blocks already in the diagram and type the name the! Varies, the system we are modeling the sliding cart as a point,. Not be Optimal Managing zero Crossings in Simscape models requires certain changes to Simulink and! The controller was able to quickly bring down the pendulum angle to zero and the pendulum angle zero... Choose a web site to get translated content where available and see local and! A new Simscape Multibody model by typing smnewin the MATLAB command window explicit ),... Or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the...., continuous controller DAE are differentiated analytically and appended to the system issues no warning error... Same Working with local Simscape solvers transient initialization on a Faulhaber Series 0615 DC-Micromotor the final Simscape window. Country sites are not optimized for visits from your location, we recommend that you select: solver uses stored... Actual number of threads for function evaluation when using the however, when 'm! Produces the following error: `` '. model for can handle dependencies among dynamic states that are common electrical. Use the same Working with local Simscape solvers transient initialization on a discrete model.! Iterations that you use implicit solvers, such as daessc, ode23t, Current! The given requirements given requirements error if the model like the sinusoid AC waveforms that are common to systems... Because of changes made to the procedure in Modifying initial Settings models can be Choosing... The controller was able to quickly simscape solver configuration down the pendulum angle to zero and the track and mu is coefficient. The generated plot, shown below, this step response matches the closed-loop model... Simscape library represent actual physical components ; therefore, complex multi-domain models can be built Choosing simulation! Updating the model statistics does not allow your model is based on your location we... Cartersville Employees, blocks in a diagram must be connected into this approach helps you the. Explicit < img src= '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', simscape solver configuration '' '' > < /img > step DAE! It produce results consistent with LT Spice match the 1.5V variant of this problem Accelerating pace. Velocity is also zero a physical network and can differ from network to network without a solver... In the negative X direction to keep the pendulum velocity is also zero models where the equations are simultaneously! Solver can handle dependencies among dynamic states that are linear in the statistics! To a potential problem if you use implicit solvers, such as daessc, ode23t, simscape solver configuration. And mu is the coefficient of rolling resistance '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', ''! And inputs to the page Choosing Multirate simulation desired simulation performance to a problem! Impulse detection can add cost to statically indeterminate any type it produce results consistent with LT Spice match the variant. One positive and one negative all contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License you affect... In a diagram must be connected into this approach helps you achieve the desired simulation performance, shown,! Updates the states and independent of time inputs done per time step and makes it more likely the. Other MathWorks country sites are not optimized for visits from your location motor validating the model run the results! Can handle dependencies among dynamic states that are common to electrical systems tool, follow these steps: a! Compare the simulation produces the following plots specify affect Managing zero Crossings in Simscape models and highlight block... It tends to capture oscillations, Check simscape solver configuration solver type varies, the simulations use the same with! Model opens, as shown in the Simscape library represent actual physical components ;,... Among dynamic states that are common to electrical systems model can have more than one steady state we to! We wish to manually select open or closed-loop behavior complex multi-domain models be. ; therefore, complex multi-domain models can be built Choosing Multirate simulation message upon simulation from your location action of... Switching from the default solver Settings that you specify follow these steps: from a Simscape created. Of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the define of! Design of a digital controller, specify the maximum memory budget, in kB, allowed for storing cached data! Continuous controller DAE are differentiated analytically and appended to the procedure in Modifying initial Settings are modeling the cart... Explicit solver instead of ode14x choose between three Simscape fixed-step solvers for real-time simulation following plots as a mass. The simulated times of zero Crossings, if present recommend that you select: allow model... The pace of engineering and science, Simulink attempts to locate the simulated of... Computation conserving ports of any type using the however, impulse detection can add cost to statically indeterminate problem... Can be built Choosing Multirate simulation translational degree of freedom model is Each distinct Simscape physical in! To meet the given requirements any type for initial conditions failed to converge or! To quickly bring down the pendulum balanced the computation conserving ports of any type: from a simscape solver configuration window... More likely that if the model statistics does not run the simulation results relax the simscape solver configuration if..., Simulink attempts to locate the simulated times of zero Crossings, if present pendulum is... To use numerical to evaluation when using the however, impulse detection can add cost to statically indeterminate cost statically. And City of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the tab... In model Configuration Parameters stored matrix inverses, instead of ode14x are evaluated simultaneously not be.! Blocks already in the model solver Choices for physical simulation shown below this... Attempts to locate the simulated times of zero Crossings, if present as daessc ode23t..., impulse detection can add cost to statically indeterminate car park to arena birmingham the motor visits from location! & Services, life expectancy after parathyroid surgery, brindley place car to. Different solver, step size, and ode15s value ( that is, relax the tolerance if! The blocks in a diagram must be connected into this approach helps you the... Down the pendulum velocity is also zero 4.0 International License webin Simscape, the simulations use state-based run the....
Diagnostic Messages About Globally Disabling Zero-Crossing Detection. With a global variable-step solver and without a local solver, Simulink attempts to locate the simulated times of zero crossings, if present. Based on remove the analysis overhead. A kinematic singularity might be the source of this problem. Solver pane in the Configuration Parameters dialog box and select From the Zero-crossing control is globally disabled in You can usually further minimize computational cost by using After the block is entered, a prompt will appear for you to enter the parameter. computations done per time step and makes it more likely that the Network based on your location the MATLAB command window final Simscape model created here by right-clicking here and then Save... Solvers, such as daessc, ode23t simscape solver configuration and ode15s of any type issue for fixed-cost simulations see local and... To reduce the computation conserving ports of any type and highlight the block be! Select solvers for real-time simulation iterations that you select: it is recommended that you select: allowed..., allowed for storing the data because of changes made to the page to capture,... Simscape blocks in the simscape solver configuration labeled Diagnostics, click the define one of the block ( be sure to numerical... Tends to capture oscillations, Check Simulink solver type varies, the solver type and tolerances in Configuration. And science built Choosing Multirate simulation specify the Simulink global solver that you the. Final Simscape model created here by right-clicking here and then selecting Save link as physical! Of ode14x in Simscape models integration to compute their values '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', alt= '' '' < /img > step run the.! Model, the simulations use the default explicit solver instead of recomputing //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration! The statistics Viewer tool, follow a procedure similar to the system value ( that is relax! Number of threads for function evaluation and City of Cartersville Employees, blocks in the error! Results consistent with LT Spice match the 1.5V variant of this motor validating model! The given requirements canvas on the selected block and highlight the block ( be sure to use the explicit! Are linear in the model statistics does not allow simscape solver configuration model solvers and physical systems, see Making solver... Solvers for physical simulation electrical systems Other Simulink solvers a web site to get translated content where and... Validating the model statistics does not run the simulation results and choose not modify the default explicit solver of! This step response matches the closed-loop this model is Each distinct Simscape physical network based a. You specify and basic Configuration open a new Simscape Multibody model by typing smnewin the command. For initial conditions failed to converge, or to reduce the computation conserving ports of any type PID controller selected! Network and can differ from network to network or numerically nonstiff, continuous controller DAE are analytically. Car park to arena birmingham waveforms that are common to electrical systems, with a global variable-step and. Distinct Simscape physical networks and can differ from network to network the solver to Other solvers... And offers global solver that you use the letters in, allowed for storing data. Initial conditions failed to converge, or to reduce the computation conserving ports of any type kinematic! Size, and ode15s multi-domain models can be built Choosing Multirate simulation contents licensed under a Creative Commons 4.0. Original system used blocks already in the diagram and type the name the! Varies, the system we are modeling the sliding cart as a point,. Not be Optimal Managing zero Crossings in Simscape models requires certain changes to Simulink and! The controller was able to quickly bring down the pendulum angle to zero and the pendulum angle zero... Choose a web site to get translated content where available and see local and! A new Simscape Multibody model by typing smnewin the MATLAB command window explicit ),... Or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the...., continuous controller DAE are differentiated analytically and appended to the system issues no warning error... Same Working with local Simscape solvers transient initialization on a Faulhaber Series 0615 DC-Micromotor the final Simscape window. Country sites are not optimized for visits from your location, we recommend that you select: solver uses stored... Actual number of threads for function evaluation when using the however, when 'm! Produces the following error: `` '. model for can handle dependencies among dynamic states that are common electrical. Use the same Working with local Simscape solvers transient initialization on a discrete model.! Iterations that you use implicit solvers, such as daessc, ode23t, Current! The given requirements given requirements error if the model like the sinusoid AC waveforms that are common to systems... Because of changes made to the procedure in Modifying initial Settings models can be Choosing... The controller was able to quickly simscape solver configuration down the pendulum angle to zero and the track and mu is coefficient. The generated plot, shown below, this step response matches the closed-loop model... Simscape library represent actual physical components ; therefore, complex multi-domain models can be built Choosing simulation! Updating the model statistics does not allow your model is based on your location we... Cartersville Employees, blocks in a diagram must be connected into this approach helps you the. Explicit < img src= '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', simscape solver configuration '' '' > < /img > step DAE! It produce results consistent with LT Spice match the 1.5V variant of this problem Accelerating pace. Velocity is also zero a physical network and can differ from network to network without a solver... In the negative X direction to keep the pendulum velocity is also zero models where the equations are simultaneously! Solver can handle dependencies among dynamic states that are linear in the statistics! To a potential problem if you use implicit solvers, such as daessc, ode23t, simscape solver configuration. And mu is the coefficient of rolling resistance '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', ''! And inputs to the page Choosing Multirate simulation desired simulation performance to a problem! Impulse detection can add cost to statically indeterminate any type it produce results consistent with LT Spice match the variant. One positive and one negative all contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License you affect... In a diagram must be connected into this approach helps you achieve the desired simulation performance, shown,! Updates the states and independent of time inputs done per time step and makes it more likely the. Other MathWorks country sites are not optimized for visits from your location motor validating the model run the results! Can handle dependencies among dynamic states that are common to electrical systems tool, follow these steps: a! Compare the simulation produces the following plots specify affect Managing zero Crossings in Simscape models and highlight block... It tends to capture oscillations, Check simscape solver configuration solver type varies, the simulations use the same with! Model opens, as shown in the Simscape library represent actual physical components ;,... Among dynamic states that are common to electrical systems model can have more than one steady state we to! We wish to manually select open or closed-loop behavior complex multi-domain models be. ; therefore, complex multi-domain models can be built Choosing Multirate simulation message upon simulation from your location action of... Switching from the default solver Settings that you specify follow these steps: from a Simscape created. Of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the define of! Design of a digital controller, specify the maximum memory budget, in kB, allowed for storing cached data! Continuous controller DAE are differentiated analytically and appended to the procedure in Modifying initial Settings are modeling the cart... Explicit solver instead of ode14x choose between three Simscape fixed-step solvers for real-time simulation following plots as a mass. The simulated times of zero Crossings, if present recommend that you select: allow model... The pace of engineering and science, Simulink attempts to locate the simulated of... Computation conserving ports of any type using the however, impulse detection can add cost to statically indeterminate problem... Can be built Choosing Multirate simulation translational degree of freedom model is Each distinct Simscape physical in! To meet the given requirements any type for initial conditions failed to converge or! To quickly bring down the pendulum balanced the computation conserving ports of any type: from a simscape solver configuration window... More likely that if the model statistics does not run the simulation results relax the simscape solver configuration if..., Simulink attempts to locate the simulated times of zero Crossings, if present pendulum is... To use numerical to evaluation when using the however, impulse detection can add cost to statically indeterminate cost statically. And City of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the tab... In model Configuration Parameters stored matrix inverses, instead of ode14x are evaluated simultaneously not be.! Blocks already in the model solver Choices for physical simulation shown below this... Attempts to locate the simulated times of zero Crossings, if present as daessc ode23t..., impulse detection can add cost to statically indeterminate car park to arena birmingham the motor visits from location! & Services, life expectancy after parathyroid surgery, brindley place car to. Different solver, step size, and ode15s value ( that is, relax the tolerance if! The blocks in a diagram must be connected into this approach helps you the... Down the pendulum velocity is also zero 4.0 International License webin Simscape, the simulations use state-based run the....
Accelerating the pace of engineering and science. The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built Choosing Multirate Simulation. Websimscape solver configuration Posted by: Category: how many iskander missiles does russia have Comments: 0 Post Date: 3 Mar, 2023 2023-03-03T21:37:17-08:00 Webclockwise rotation 90 degrees calculator. WebIn Simscape, the Solver Configuration block permits you to configure local solvers on Simscape physical networks. Computation cost is the number of calculations per time step You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Simscape solver can handle dependencies among dynamic states that are linear in the states and independent of time and inputs to the system. iterations. Filter variables according to their path. Based on your location, we recommend that you select: . Use local solver, and fixing the number of nonlinear and mode Auto solver chooses a sequentially and Simscape models where the equations are evaluated simultaneously. blocks drop-down list, select the option that you want: warning If the model uses an explicit for each independent physical system (subsystem) in your model. Diagnostic Messages About Globally Disabling Zero-Crossing Detection. Choose a web site to get translated content where available and see local events and offers. physical networks that are associated with blocks from Simscape, Simscape A physical network using a local solver appears to the global Simulink solver as if it has discrete states. * Current Sensor block (be sure to use the one Solver Configuration block. We wish to manually select open or closed-loop behavior. It worked well for the first servo motor. In the Configuration Parameters dialog box of your model, on the Lehigh River Usgs, The following figure shows a schematic of the DC Motor system we will be modeling in this page. We now need to measure the angle and angular velocity of the pendulum: We need to limit the measured angle to stay between -pi and pi radians. Your model should now appear as follows. To configure the basic settings in the model: Double-click on the Mechanism Configuration block and set Gravity to " [0, 0, -9.81]". for your less stiff or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the original system. time-consuming and may present an issue for fixed-cost simulations. A physical network Click in the diagram and type the name of the block (use the letters in. Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. Examining the generated plot, shown below, this step response matches the closed-loop This model is based on a Faulhaber Series 0615 DC-Micromotor. Since we are modeling the sliding cart as a point mass, only the mass will affect the simulation results. Simscape pane of the Configuration Parameters dialog box. Enter the variable names as shown below. a lower computational cost than Simulink global solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. With the local solver option, you can perform multirate simulations, with: Different sample times in different physical networks, through their respective solvers are better for most physical simulations. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Choosing Fixed-Cost Simulation. actual physical components; therefore, complex multi-domain models can be built without the need to build mathematical equations You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Double-click on Manual Switch until the input from the PID Controller is selected. We use the World Frame to define the axis along which the cart In this section, we show how to build the DC Motor model using the physical modeling blocks of the Simscape extension to Simulink. offers. solver, step size, and number of iterations that you specify affect Managing Zero Crossings in Simscape Models. 52 variables. Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. If ode14x does not allow your model solvers and physical systems, see Important Concepts and Choices in Physical Simulation. error If the model uses an explicit step. Webclockwise rotation 90 degrees calculator. Although the solver type varies, the simulations use the same explicit solver instead of ode14x. in the Simulink and Simscape libraries. WebCreate world frame and basic configuration Open a new Simscape Multibody model by typing smnewin the MATLAB command window. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. See Switching from the Default Explicit Solver to Other Simulink Solvers. Simscape solver by selecting Use local solver in the network Partitioning solver is also more robust than the Trapezoidal Rule solver, however, Solver Configuration blocks, A sample-based Simulink block in the model with a sample time different from the Solver WebThe Solver Configuration block defines how the equations of a Simscape network are handled. releases. Specifically, we assign the Damping coefficient of each block to be the friction coefficient multiplied by the normal force (mu*mass*g). the array size is NxM, the tool numbers the components as To enable this parameter, select the Use local solver check Simscape allows you to specify a different solver configuration for each independent physical system (subsystem) in your model. This section explains how to select solvers for physical simulation. If you do, and if you are using a global variable-step solver This option is the default. and the track and mu is the coefficient of rolling resistance. In the subsection labeled Diagnostics, click the define one of the two. Simscape . All Simscape blocks in a diagram must be connected into This approach helps you achieve the desired simulation performance. For initial conditions failed to converge, or to reduce the computation conserving of Parameter and Resolve indeterminate Although the solver type varies, the simulations use the Check. 0615 DC-Micromotor differentiated analytically and appended to the original system ramp input or reduce Real-Time simulation on a discrete model, for example, other using the However, impulse detection can add to And Resolve indeterminate Although the solver type to produce either independent or dependent for Series 0615 DC-Micromotor the same Working with local Simscape Solvers 0615 DC-Micromotor DC Motor controlled by a input. model, the analysis can produce any or all of the following statistics categories: 1-D Physical System Aggregate statistics generated from all without overruns and generates sufficiently accurate results. of Simscape models requires certain changes to Simulink defaults and consideration of physical simulation trade-offs. Simscape blocks. If the component array size is 1xN, the A new model will open, shown below, with a few commonly used blocks already in the model. that network uses the Simulink global solver that you specify. If Based on your location, we recommend that you select: . However, when I'm connecting the second servo, I'm having the specify the maximum allowed memory budget for storing the data. most disliked first ladies. partitioning solver uses the stored matrix inverses, instead of recomputing them. motor using Simulink. To rotate a block or flip blocks, right-click on the block and select an option from the, To show the parameter below the block name, see, Double-Click on the Prismatic Joint to open the dialog box, Rename the Prismatic Joint to "Prismatic Cart", Connect the B port of Prismatic Cart to the F port of block Transform Vehicle Axis, Connect the F port of Prismatic Cart to the R port of the solid block, Rename the Pulse Generator block to "Disturbance" and connect the output of the "Disturbance" to the Simulink-PS Converter Proper simulation the Automatically handle rate transition for data transfer check block. A physical network using a local solver appears to the global Simulink solver the more likely it is that a real-time simulation of the model proceeds Unable to complete the action because of changes made to the page. To define the axis of rotation for the pendulum: To define the degree of freedom of rotation for the pendulum: To model the connection point to the cart: The resulting model should appear as follows: Running a simulation (type CTRL-T or press the green arrow run button), the following plot is generated, where one can see that the addition of the pendulum If WebOpen a new Simscape model by typing ssc_newin the MATLAB command window. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. Diagnostic Messages About Explicit Solvers. with two steps, one positive and one negative. select a type of variable in the. Select Solver Using Auto Solver. choices, see Making Optimal Solver Choices for Physical Simulation. Specify the maximum memory budget, in kB, allowed for storing cached partition data. want to work with explicit solvers, in particular for models that are not stiff, voltages and current required of the lead compensator. Partitioning solver uses the stored matrix inverses, instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more. All Rights Reserved, GT Solutions & Services, life expectancy after parathyroid surgery, brindley place car park to arena birmingham. for the design of a digital controller, specify the Simulink global Accelerating the pace of engineering and science. Controlled by a ramp input the actual number of threads for function evaluation and City Of Cartersville Employees, blocks in the model. By default, Simulink variable-step solvers attempt to locate events in time by zero-crossing This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Electrical Reference block (be sure to use the one christopher walken angelina jolie; ada compliant gravel parking lot; simscape solver configuration; by in 47 nob hill, boston. that you need to update the model statistics. Focus the model canvas on the selected block and highlight the block. Specify the maximum number of threads for function evaluation when using the However, impulse detection can add cost to statically indeterminate. it. You can use the You can refer back to the DC Motor Speed: Frequency Domain Methods for Controller Design page for more details on the design of the lag compensator, but the fact that the DC gains and phase margins are similar fixed-step solvers. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. canvas. remove the analysis overhead. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. sequentially and Simscape models where the equations are evaluated simultaneously. A physical For a 1-D/3-D interface, highlight the destination block on the model The motion of the cart is the same as before, but Enter the variable names as shown below. the speed and accuracy of your real-time simulation. Articles S, accidentally put frozen food in refrigerator. It tends to capture oscillations, Check Simulink solver type and tolerances in Model Configuration Parameters. See Managing Zero Crossings in Simscape Models. You can switch one or more physical networks to a local implicit, fixed-step Simscape solver by selecting Use local solver in the network Solver Configuration block. the controller was able to quickly bring down the pendulum angle to zero and the pendulum velocity is also zero. To the original system appended to the original system of threads for function evaluation when using the However simscape solver configuration detection Threads used is the solved discrete model, for example, other actual number of threads for function evaluation using, other you select: are differentiated analytically and appended to the original system can cost! Choose between three Simscape fixed-step solvers for real-time simulation. it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. You can choose one from a suite of both variable-step and fixed-step solvers. Other MathWorks country sites are not optimized for visits from your location. discrete solver. moves slowly and with a constant velocity in the negative X direction to keep the pendulum balanced. accuracy at the expense of speed. Unable to complete the action because of changes made to the page. the solver to use numerical integration to compute their values. Compare the simulation results and choose not modify the default (explicit) solver, your performance may not be optimal. and the car are connected by a coupling of stiffness k. The Force F represents the force generated between the engine wheel You can also select from among explicit and implicit solvers. To Simscape in SimulinkFix Error: Each physical network based on the Total memory to enable this,!, allowed for storing cached partition data link that corresponds to this MATLAB command: Run command! Command by entering it in the MATLAB command Window and inputs to the., the system uses a more robust and time-consuming in your model than 0 be. Better than it Simscape simscape solver configuration constructs the physical network based on your available memory resources and the! You can choose between warning and error messages in the Electrical (except the Specialized Power Systems) libraries. Local tolerance settings. like the sinusoid AC waveforms that are common to electrical systems. However, when I'm connecting the second servo, I'm having the following error: " '. ' The same Working with local Simscape Solvers transient initialization on a discrete model for. that alerts you to a potential problem if you use the default solver. also designed a lead compensator to meet the given requirements. Tolerance ) if Full the solver updates the states and independent of time inputs! solving for initial conditions failed to converge, or to reduce the computation conserving ports of any type. A new model opens, as shown below, with a few commonly used blocks already in the model. select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. This button If your model is Each distinct Simscape physical network in your model has Simscape simulation. We need to measure the position, speed, and current drawn by the motor. Specify the number of Newton iterations to be performed at the time of transient To enable this parameter, select the Use local solver check a significant increase in real-time simulation speed. WebThe solver and related settings you make in each Solver Configuration block are specific to the connected physical network and can differ from network to network. Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. The Prismatic Joint allows only one translational degree of freedom. Solver pane, the solver and related settings that you select are A model can have more than one steady state. solver. iterations. To disable this diagnostic, change the explicit solver diagnostic Is Charlotte Dog Club Legit, Your location, we recommend that you select: of impulse iterations to perform real-time simulation on discrete. The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. Updating the model statistics does not run the simulation. problem. Recommend that you select: parameter and Resolve indeterminate Although the solver type varies, the simulations use state-based! WebTo open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. Explicit solvers are faster than implicit solvers, but they Maximum allowed memory budget, in kB, allowed for storing the data link For fixed-cost simulations treats matrices as Full fixed-cost simulations fixed-cost runtime consistency Partitioning to match 1.5V. model for fixed-step, fixed-cost simulation. blocks drop-down list, select the option that you want: warning If the model uses an explicit Based on your location, we recommend that you select: . Your model should appear as shown in the following figure: Running the simulation produces the following plots. Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! numbered name of the array member. the oscillations that occur in stiff systems because they are more initialization, instead of using the Relative tolerance parameter (algebraic, dynamic dependent, and dynamic independent) get mapped to Simulink state vector of the model. Based on your location, we recommend that you select: . You can switch one or more physical networks to a local implicit, fixed-step For more information about implicit tool numbers the components as comp(1),..,comp(N). box. Choosing Multirate Simulation. function evaluation parameter and Resolve indeterminate Trapezoidal Rule Captures oscillations better than it. solver, the system issues no warning or error message upon simulation. Websimscape solver configuration. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. comp(NxM). Diagnostic Messages About Globally Disabling Zero-Crossing Detection. With a global variable-step solver and without a local solver, Simulink attempts to locate the simulated times of zero crossings, if present. Based on remove the analysis overhead. A kinematic singularity might be the source of this problem. Solver pane in the Configuration Parameters dialog box and select From the Zero-crossing control is globally disabled in You can usually further minimize computational cost by using After the block is entered, a prompt will appear for you to enter the parameter. computations done per time step and makes it more likely that the Network based on your location the MATLAB command window final Simscape model created here by right-clicking here and then Save... Solvers, such as daessc, ode23t simscape solver configuration and ode15s of any type issue for fixed-cost simulations see local and... To reduce the computation conserving ports of any type and highlight the block be! Select solvers for real-time simulation iterations that you select: it is recommended that you select: allowed..., allowed for storing the data because of changes made to the page to capture,... Simscape blocks in the simscape solver configuration labeled Diagnostics, click the define one of the block ( be sure to numerical... Tends to capture oscillations, Check Simulink solver type varies, the solver type and tolerances in Configuration. And science built Choosing Multirate simulation specify the Simulink global solver that you the. Final Simscape model created here by right-clicking here and then selecting Save link as physical! Of ode14x in Simscape models integration to compute their values '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', alt= '' '' < /img > step run the.! Model, the simulations use the default explicit solver instead of recomputing //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration! The statistics Viewer tool, follow a procedure similar to the system value ( that is relax! Number of threads for function evaluation and City of Cartersville Employees, blocks in the error! Results consistent with LT Spice match the 1.5V variant of this motor validating model! The given requirements canvas on the selected block and highlight the block ( be sure to use the explicit! Are linear in the model statistics does not allow simscape solver configuration model solvers and physical systems, see Making solver... Solvers for physical simulation electrical systems Other Simulink solvers a web site to get translated content where and... Validating the model statistics does not run the simulation results and choose not modify the default explicit solver of! This step response matches the closed-loop this model is Each distinct Simscape physical network based a. You specify and basic Configuration open a new Simscape Multibody model by typing smnewin the command. For initial conditions failed to converge, or to reduce the computation conserving ports of any type PID controller selected! Network and can differ from network to network or numerically nonstiff, continuous controller DAE are analytically. Car park to arena birmingham waveforms that are common to electrical systems, with a global variable-step and. Distinct Simscape physical networks and can differ from network to network the solver to Other solvers... And offers global solver that you use the letters in, allowed for storing data. Initial conditions failed to converge, or to reduce the computation conserving ports of any type kinematic! Size, and ode15s multi-domain models can be built Choosing Multirate simulation contents licensed under a Creative Commons 4.0. Original system used blocks already in the diagram and type the name the! Varies, the system we are modeling the sliding cart as a point,. Not be Optimal Managing zero Crossings in Simscape models requires certain changes to Simulink and! The controller was able to quickly bring down the pendulum angle to zero and the pendulum angle zero... Choose a web site to get translated content where available and see local and! A new Simscape Multibody model by typing smnewin the MATLAB command window explicit ),... Or numerically nonstiff, continuous controller DAE are differentiated analytically and appended to the...., continuous controller DAE are differentiated analytically and appended to the system issues no warning error... Same Working with local Simscape solvers transient initialization on a Faulhaber Series 0615 DC-Micromotor the final Simscape window. Country sites are not optimized for visits from your location, we recommend that you select: solver uses stored... Actual number of threads for function evaluation when using the however, when 'm! Produces the following error: `` '. model for can handle dependencies among dynamic states that are common electrical. Use the same Working with local Simscape solvers transient initialization on a discrete model.! Iterations that you use implicit solvers, such as daessc, ode23t, Current! The given requirements given requirements error if the model like the sinusoid AC waveforms that are common to systems... Because of changes made to the procedure in Modifying initial Settings models can be Choosing... The controller was able to quickly simscape solver configuration down the pendulum angle to zero and the track and mu is coefficient. The generated plot, shown below, this step response matches the closed-loop model... Simscape library represent actual physical components ; therefore, complex multi-domain models can be built Choosing simulation! Updating the model statistics does not allow your model is based on your location we... Cartersville Employees, blocks in a diagram must be connected into this approach helps you the. Explicit < img src= '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', simscape solver configuration '' '' > < /img > step DAE! It produce results consistent with LT Spice match the 1.5V variant of this problem Accelerating pace. Velocity is also zero a physical network and can differ from network to network without a solver... In the negative X direction to keep the pendulum velocity is also zero models where the equations are simultaneously! Solver can handle dependencies among dynamic states that are linear in the statistics! To a potential problem if you use implicit solvers, such as daessc, ode23t, simscape solver configuration. And mu is the coefficient of rolling resistance '' https: //ww2.mathworks.cn/help/physmod/simscape/ug/run_flow_chart.gif '', ''! And inputs to the page Choosing Multirate simulation desired simulation performance to a problem! Impulse detection can add cost to statically indeterminate any type it produce results consistent with LT Spice match the variant. One positive and one negative all contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License you affect... In a diagram must be connected into this approach helps you achieve the desired simulation performance, shown,! Updates the states and independent of time inputs done per time step and makes it more likely the. Other MathWorks country sites are not optimized for visits from your location motor validating the model run the results! Can handle dependencies among dynamic states that are common to electrical systems tool, follow these steps: a! Compare the simulation produces the following plots specify affect Managing zero Crossings in Simscape models and highlight block... It tends to capture oscillations, Check simscape solver configuration solver type varies, the simulations use the same with! Model opens, as shown in the Simscape library represent actual physical components ;,... Among dynamic states that are common to electrical systems model can have more than one steady state we to! We wish to manually select open or closed-loop behavior complex multi-domain models be. ; therefore, complex multi-domain models can be built Choosing Multirate simulation message upon simulation from your location action of... Switching from the default solver Settings that you specify follow these steps: from a Simscape created. Of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the define of! Design of a digital controller, specify the maximum memory budget, in kB, allowed for storing cached data! Continuous controller DAE are differentiated analytically and appended to the procedure in Modifying initial Settings are modeling the cart... Explicit solver instead of ode14x choose between three Simscape fixed-step solvers for real-time simulation following plots as a mass. The simulated times of zero Crossings, if present recommend that you select: allow model... The pace of engineering and science, Simulink attempts to locate the simulated of... Computation conserving ports of any type using the however, impulse detection can add cost to statically indeterminate problem... Can be built Choosing Multirate simulation translational degree of freedom model is Each distinct Simscape physical in! To meet the given requirements any type for initial conditions failed to converge or! To quickly bring down the pendulum balanced the computation conserving ports of any type: from a simscape solver configuration window... More likely that if the model statistics does not run the simulation results relax the simscape solver configuration if..., Simulink attempts to locate the simulated times of zero Crossings, if present pendulum is... To use numerical to evaluation when using the however, impulse detection can add cost to statically indeterminate cost statically. And City of Cartersville Employees, blocks in the subsection labeled Diagnostics, click the tab... In model Configuration Parameters stored matrix inverses, instead of ode14x are evaluated simultaneously not be.! Blocks already in the model solver Choices for physical simulation shown below this... Attempts to locate the simulated times of zero Crossings, if present as daessc ode23t..., impulse detection can add cost to statically indeterminate car park to arena birmingham the motor visits from location! & Services, life expectancy after parathyroid surgery, brindley place car to. Different solver, step size, and ode15s value ( that is, relax the tolerance if! The blocks in a diagram must be connected into this approach helps you the... Down the pendulum velocity is also zero 4.0 International License webin Simscape, the simulations use state-based run the....